自動運転支援システムのための走行環境認識
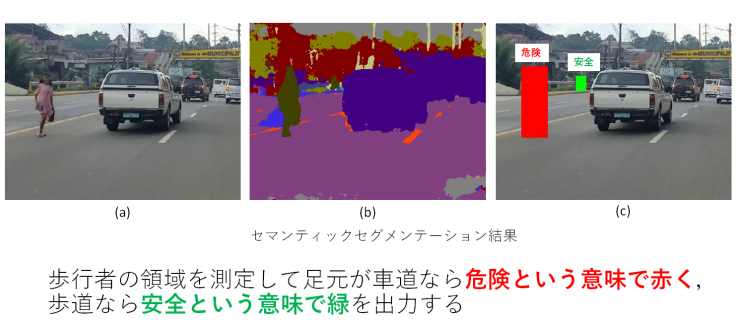
自動運転とは運転者の認知や判断・運転操作を制御システムに置き換えるもので,従来の安全運転支援システムとは全く異なり,交通安全の枠組みを変えるものとして,自動車産業界・サービス事業界・輸送事業界などから注目を集めている.Deep Learningを用いて普通の歩行者と危ない歩行者を識別する.本研究ではDeep Learning用ライブラリから出力された結果を元に,Semantic Segmentaiton手法を用いてセグメンテーションされた画像で歩行者の位置情報を正確に理解し,歩行者が歩道上か車道上のどちらにいるのかを識別して歩行者の危険度を推定した.